


Որպես խիտ պահեստավորման համար կարևոր տրանսպորտային սարքավորում, խելացի ծղոտե տիպի քառուղի մաքոքային մեքենան խելացի երթուղիով առաջնորդվող ավտոմատ հետընթաց և ուղու փոփոխվող տրանսպորտային սարքավորում է: Էլեկտրական կառավարման համակարգի հսկողության ներքո այն ճշգրիտ տեղակայում է յուրաքանչյուր մուտքային և ելքային կայան թվային տեխնոլոգիաների միջոցով, ինչպիսիք են կոդավորիչները, RFID-ը, ֆոտոէլեկտրական սենսորները և հագեցած է խելացի պլանավորման համակարգով: Նյութերը ստանալուց հետո այն ավտոմատ կերպով տեղափոխվում է ետ ու առաջ: Պալետային քառակողմ մեքենան չի պահանջում մարդու շահագործում, արագ վազքի արագությունը և խելամտության բարձր մակարդակը, որը հարմար է տարբեր լոգիստիկ պահեստավորման համակարգերի համար, կարող է նպաստել միավորի նյութերի հարթ ավտոմատ փոխադրման արագ իրականացմանը: Խելացի պլանավորման համակարգերով պայմանավորված՝ բազմաշերտ և բազմաշերտ մեքենաների համատեղ զուգահեռ գործողություններն իրականացվում են ճշգրիտ և արդյունավետ շահագործման ռեժիմների հասնելու համար՝ տրամադրելով նոր լոգիստիկ լուծումներ ձեռնարկությունների լոգիստիկ պահեստավորման համակարգերի համար:
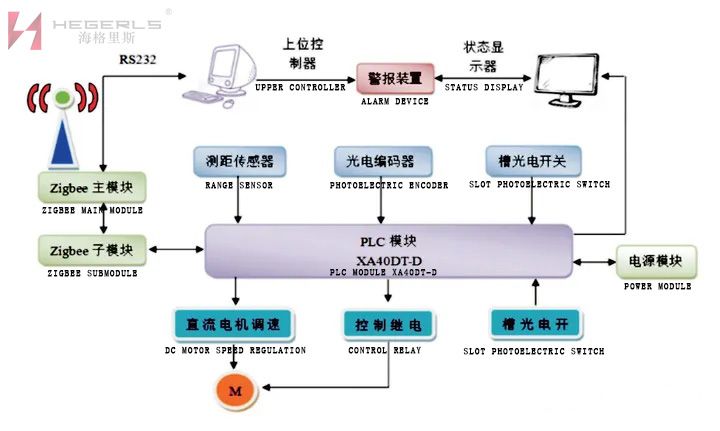
Խելացի սկուտեղի քառակողմ մաքոքային տրանսպորտային միջոցների պահպանման համակարգի ներդրման հիմնական դժվարությունները և հիմնական կետերը կայանում են ապարատային հուսալիության, կապի և դիրքավորման տեխնոլոգիաների, պլանավորման համակարգի և այլնի մեջ: Մասնավորապես, ապարատային հուսալիության առումով, Hebei Woke HEGERLS-ը հիմնականում հասնում է արտադրանքի հուսալիության: երեք ասպեկտներից. Նախ, մեքենայի մարմնի վրա կազմաձևված են 16 սենսորներ, որոնք ապահովում են մեքենայի շահագործման իրական ժամանակի մոնիտորինգը. Հաջորդը, ընտրեք ստանդարտ PLC-ն Siemens s7-200 SMATER շարքից՝ կառավարման կայունությունը բարելավելու համար: Ի լրումն, HEGERLS ծղոտե ներքնակային քառակողմ մաքոքն ամբողջությամբ ընդունում է մոդուլային դիզայն, որն ավելի հարմար և արդյունավետ է դարձնում բաղադրիչների փոխարինումը, երբ դրանք խափանվում են: Միևնույն ժամանակ, հարմար է նաև այլ փոքր մեքենաների համար աջակցություն ցուցաբերել։ Բոլոր կառուցվածքային բաղադրիչները ինքնուրույն մշակված և արտադրված են Hebei Woke-ի կողմից՝ խստորեն վերահսկելով որակն ու ճշգրտությունը:
Կապի և դիրքավորման տեխնոլոգիայի առումով, բարձր խտության ապրանքներն ու դարակները սովորաբար խանգարում են կապի ազդանշանների փոխանցմանը, դրանով իսկ ազդելով ծղոտե ներքնակային քառակողմ մաքոքի և դրա համակարգի տվյալների փոխանակման արդյունավետության վրա, ինչը հանգեցնում է ոչ ճշգրիտ դիրքավորման և դիրքի կորստի: Ըստ տարբեր փաստացի իրավիճակների՝ Hebei Woke-ն ընտրել է կոդավորիչի դիրքավորումը, լազերային դիրքավորումը, շտրիխ/երկչափ կոդի դիրքավորումը, RFID դիրքավորումը և դիրքավորման այլ մեթոդներ՝ պահեստում քառակողմ մաքոքային մեքենաների անխափան ռոումինգն իրականացնելու, հակամիջամտությունը բարելավելու համար։ մեքենայի կարողությունը, հնարավորություն տալ նրան ավտոմատ կերպով բեռնել հավասարակշռությունը և այդպիսով վերացնել խափանման մեկ կետը:
Ժամանակացույցի համակարգերի առումով, միայն մի քանի տրանսպորտային միջոցների պլանավորման համակարգի ներդրմամբ կարող է մեծապես բարելավվել չորս ուղղություններով մաքոքային մեքենաների կիրառելիությունը: HEGERLS-ի չորսակողմ մաքոքային բազմատար մեքենաների պլանավորման համակարգը ներառում է չորս ասպեկտ՝ տիեզերական երթևեկության վերահսկում, առաջադրանքների բաշխում, սարքավորումների շահագործման խափանումների վերլուծություն և ճանապարհի պլանավորում: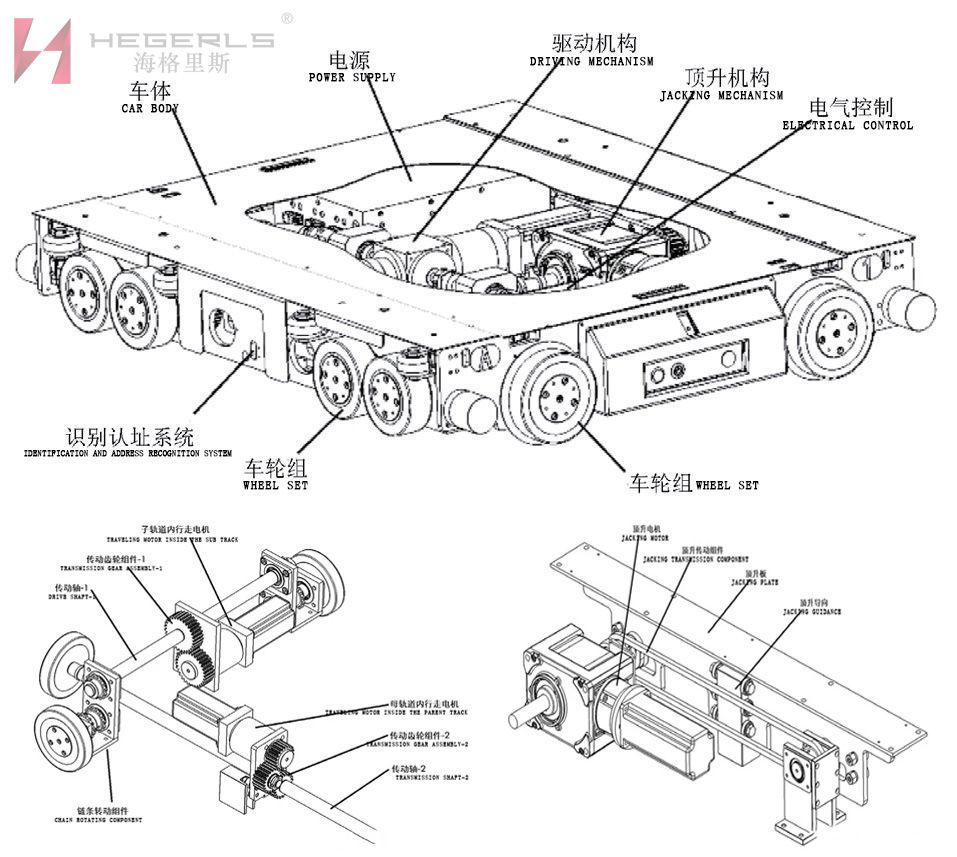
Hebei Woke-ի կողմից ինքնուրույն մշակված և արտադրված HEGERLS ծղոտե ծղոտե ներքնակի չորսակողմանի մաքոքային մեքենայի ընդհանուր մեխանիզմը նույնպես տարբերվում է այլ արտադրողներից: HEGERLS ծղոտե ներքնակով քառակողմ մաքոքային մեքենայի հիմնական մեխանիզմի ձևավորումը հետևյալն է.
Առաջադրանքի պահանջների համաձայն՝ քառակողմ մեքենան համագործակցում է փոխադարձ վերելակի հետ՝ վազքուղու միջով դարակների տարբեր շերտերում և բեռների գծերում շահագործման առաջադրանքները կատարելու համար: Պահեստի մոնիտորինգի համակարգի հսկողության և պլանավորման ներքո ամբողջ խիտ պահեստը կարող է հասնել բազմաշերտ և բազմաշերտ մեքենաների միաժամանակյա աշխատանքի: Յուրաքանչյուր քառակողմ մեքենա կարող է շահագործման ընթացքում տեղեկատվության կառավարման համակարգ վերբեռնել տեղեկատվություն, ինչպիսիք են գտնվելու վայրը, արագությունը, էլեկտրականությունը, հասանելիությունը, անսարքությունները և աշխատանքային պայմանները. Չորս ճանապարհով մեքենան ունի այնպիսի գործառույթներ, ինչպիսիք են զանգվածային պահեստավորումը և առբերումը, բեռների տեղափոխումը և ծղոտե ներքնակների հաշվումը, ինչը հնարավորություն է տալիս նյութերի արագ առաքում և գույքագրման կառավարում; Այն ներսից հագեցված է խոչընդոտներից խուսափելու գործառույթով և անսարքության ահազանգման արագ գործառույթով, որը կարող է ապահովել անվտանգության պաշտպանություն և սխալի մասին տեղեկատվության ժամանակին հետադարձ կապ: Սարքավորումների համակարգի տեսանկյունից քառակողմ մեքենան հիմնականում բաղկացած է այնպիսի բաղադրիչներից, ինչպիսիք են շրջանակը, բարձրացնող մեխանիզմը, շարժիչ մեխանիզմը, անիվի խումբը, էլեկտրամատակարարումը, էլեկտրական հսկողությունը և այլն:
1) Տրանսպորտային միջոցի կառուցվածքը
Մոդուլային դիզայնի տեխնոլոգիան կիրառվում է քառակողմ մեքենայի թափքի կառուցվածքի վրա, որը ձևավորվում է բարձրորակ պողպատի համադրությամբ: Մեքենայի նախագծված բեռնատարողությունը 1500 կգ կամ ավելի է, իսկ անվտանգության նվազագույն գործակիցը խորհուրդ է տրվում լինել 1,6: Նյութի ելքի ուժը 2,75 ՄՊա է; Մեքենայի քառակողմ թափքի կառուցվածքը օպտիմիզացված է ամբողջ մեքենայի հուսալիության և կառուցվածքի թեթևության համար:
2) ժայթքման մեխանիզմ
Մեքենայի չորս ուղղություններով շահագործումը պահանջում է վերից վար և հետընթաց մի քանի գործողություններ, և պետք է նախագծվի մեխանիկական մեխանիզմ կամ հիդրավլիկ վերևից վար սարք: Հաշվի առնելով մեխանիկական կառուցվածքի անվտանգությունը, հուսալիությունը և երկարակեցությունը, խորհուրդ է տրվում ունենալ 40 մմ բարձրացման հարված և 3-5 վայրկյան բարձրացման ժամանակ: Չորս ճանապարհով մեքենան ավարտում է մեկ գործառնական ցիկլ՝ ծղոտե ներքնակը բարձրացնելով և իջեցնելով և ապրանքների բեռնաթափումը հակառակ ուղղությամբ: Շահագործման արդյունավետությունը բարելավելու համար անհրաժեշտ է ապահովել, որ քառակողմ մեքենան արագորեն իջնի և հետ շրջվի շահագործման գործընթացում, որպեսզի կրճատվի շահագործման ցիկլը:
3) շարժիչ մեխանիզմ և անիվներ
Չորս կողմ մեքենա վարելու մեխանիզմը ընդունում է սերվո շարժիչի շարժիչ, մոլորակային դանդաղեցում և կոմուտատոր՝ երկու ուղղություններով արագ փոխադրումը խթանելու համար: Նորմալ աշխատանքային պայմաններում առանց բեռնվածքի աշխատանքային արագությունը 1,4 մ/վ-1,6 մ/վ է, իսկ լրիվ բեռնվածությամբ աշխատանքային արագությունը՝ 1,0 մ/վ-1,2 մ/վ; Դարակի մակարդակի վրա հորիզոնական վազելիս քառակողմ մեքենան ընդունում է 4 անիվի շարժիչը X ուղղությամբ և 8 անիվի շարժիչը Z ուղղությամբ: 8-անիվ (շարժվող և շարժվող անիվների համակցություն) փոխանցման ռեժիմն ընտրված է համակարգի նախագծման պահանջներին համապատասխանելու համար՝ ապահովելով մեքենայի քայլելու կայունությունը՝ միաժամանակ նվազեցնելով ներքին մեխանիկական համակարգի բարդությունը: Երբ քառակողմ մեքենան շարժման մեջ է, նրա անիվները ենթարկվում են երկարատև շփման և պահանջում են մաշվածության դիմացկուն անիվներ: Կատարման փորձարկումից հետո պոլիուրեթանային անիվները ընտրվում են ամրության, աղմուկի նվազեցման և շահագործման կայունության ապահովման համար:

Hagrid HEGERLS ծղոտե ծղոտի ճկուն բազմաշերտ և բազմաշերտ տրանսպորտային միջոցը մեծապես բարելավում է ներգնա և ելքային գործառնությունների արդյունավետությունը՝ լուծելով ավանդական եռաչափ պահեստների խցանման խնդիրը, որտեղ ստեկերը կարող է մտնել և դուրս գալ միայն մեկ գծով: . Վերջին տարիներին, հիմնվելով ներքին և արտասահմանյան պահեստավորման շուկաների իրական կարիքների վրա, Hebei Woke-ը մշակել է ծղոտե ներքնակային քառուղի մաքոքային մեքենաներ՝ տեխնոլոգիական առավելություններով, ինչպիսիք են նոր տեսքը, ամբողջական գործառույթները, անվտանգությունը և հուսալիությունը: Ի լրումն ներքին և արտասահմանյան հետվաճառքի սպասարկման համակարգերի, ապագայում Hebei Woke-ը հաստատապես կհասկանա խելացի պահեստավորման զարգացման հզոր թափը, միշտ հավատարիմ կմնա հաճախորդների պահանջարկի կողմնորոշմանը և կշարունակի բարձր խելամտություն և որոշումներ կայացնել հաճախորդներին Ինտեգրված խելացի: պահեստավորման ընդհանուր լուծում.
Հրապարակման ժամանակը` մայիս-19-2023