



Պահեստում կան տարբեր տեսակի պահեստային դարակներ, և պահեստավորման և որոնման մեթոդները հիմնականում բաժանված են հետևյալ կատեգորիաների, ներառյալ ձեռքով պահեստավորում և առբերում, բեռնատարի պահեստավորում և առբերում և ավտոմատ պահեստավորում և առբերում: Մեր օրերում շատ ձեռնարկություններ ցանկանում են իրականացնել պահեստների ավտոմատ շահագործում, ուստի ցանկանում են օգտագործել պահեստի ավտոմատացված դարակներ: Օրինակ, քառակողմ մեքենայի դարակը մի տեսակ ավտոմատ պահեստավորման դարակ է: Ինչպե՞ս է քառակողմ մաքոքային AGV-ն մտնում և դուրս գալիս պահեստ: Պահեստի ծանր դարակաշարերի արտադրության Haigris գործարանը վերլուծել է:

Չորս ճանապարհի մաքոքային պահեստ
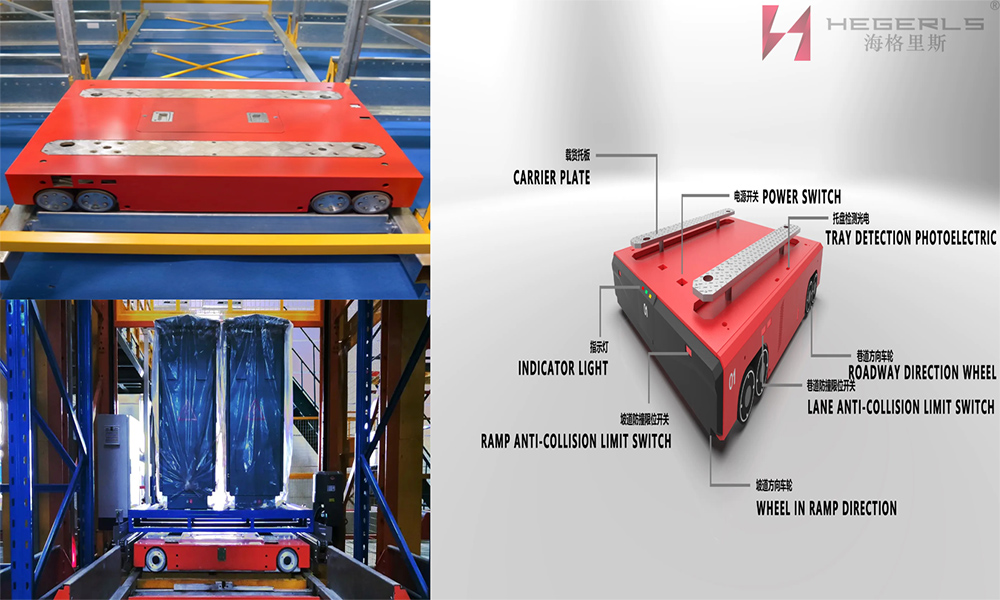
Չորս ուղղություններով մաքոքային մեքենան հագեցած է 12 անիվներով, որոնք կարող են երթևեկել չորս ուղղություններով ուղու հարթության երկայնքով և ազատորեն հասնել պահեստային ինքնաթիռի ցանկացած բեռնատար տարածք: Չորս կողմի մաքոքը միաժամանակ երկու կողմից շարժվում է անիվներով՝ ապահովելու, որ մեքենայի թափքը շահագործման ընթացքում չի շեղվում, և այն կարող է հերթափոխով շարժվել եռաչափ դարակի երկայնական և լայնակի ռելսերի երկայնքով:

Միևնույն ժամանակ, քառակողմ մաքոքը խելացի բեռնաթափման սարք է, որը կարող է քայլել ոչ միայն երկայնական, այլև կողային: Չորս ճանապարհով մաքոքն ունի բարձր ճկունություն, կարող է ըստ ցանկության փոխել աշխատանքային ճանապարհը և կարգավորել համակարգի հզորությունը՝ ավելացնելով կամ նվազեցնելով մաքոքային մեքենաների քանակը: Անհրաժեշտության դեպքում, համակարգի գագաթնակետային արժեքին կարելի է արձագանքել՝ սահմանելով աշխատանքային տրանսպորտային միջոցների պլանավորման ռեժիմը, լուծելով մուտքի և ելքի գործառնությունների խցանումը, ինչպես նաև կարող է փոխարինվել միմյանց հետ, երբ մաքոքը կամ վերելակը խափանում են, այլ մաքոքային կամ վերելակները կարող են ուղարկվել դիսպետչերական համակարգի միջոցով, որպեսզի շարունակեն ավարտել աշխատանքը՝ չազդելով համակարգի հզորության վրա: Այս սարքը հարմար է ինչպես ցածր հոսքի և բարձր խտության պահեստավորման, այնպես էլ բարձր հոսքի և բարձր խտության պահեստավորման համար: Այն կարող է հասնել ավելի մեծ արդյունավետության, ծախսերի և ռեսուրսների:
Ինչպե՞ս է քառակողմ մաքոքային AGV-ն մտնում և դուրս գալիս պահեստ:

1) Պահեստավորման եղանակը
ա) Խելացի քառակողմ մաքոքի տեխնիկները նախ միացնում են խելացի քառակողմ մաքոքը և պատրաստում: Խելացի քառակողմ մաքոքը սպասման վիճակում է.
բ) Խելացի քառակողմ մաքոքի ընտրության վայրը հաստատելուց հետո, WCS-ը կպլանավորի վարման երթուղին ըստ խելացի քառակողմ մաքոքի ներկա գտնվելու վայրի և նպատակակետի, այնուհետև անձնակազմը ապրանքները կբաշխի խելացի չորս ուղղություններով: մաքոքային WCS-ի միջոցով;
գ) Խելացի քառակողմ մաքոքը սկսում է իրականացնել առաքման առաջադրանքը՝ ըստ ստացված առաջադրանքի հրամանի.
դ) Անցման ուղու վրա խելացի քառակողմ մաքոքը շարժվում է տեղաշարժի ռեժիմով իրական հեռավորության վրա: Վարելու ընթացքում այն անընդհատ սկանավորում է այն հետքերը, որոնցով անցնում է մեքենայի մարմնի ստորին հատվածը: Յուրաքանչյուր անցումային դիրք, որը նա անցնում է, դատում և չափում է իր անցած հեռավորությունը՝ սկանավորելով հետքերը: Երբ այն մոտ է նպատակակետին, այն լավ կարգավորում է կայանման դիրքը կողային լազերային սենսորի միջոցով՝ կայանման դիրքի ճշգրիտ դիրքավորման հասնելու համար.
ե) Ենթաալիքում խելացի քառակողմ մաքոքը կարող է սկանավորել խաչմերուկը և կողային տրամաչափման հայելային ռեֆլեկտորը, դատել և ստուգել վարման հեռավորությունը՝ սկանավորելով կետի դիրքը և հասնել ճշգրիտ դիրքավորման հսկողության ենթաալիքում՝ նպատակակետին հասնելու համար.
զ) Երբ խելացի քառակողմ մաքոքը հասնում է ընտրված հավաքման դիրքին, ծղոտե ներքնակն ընկնում է, ապրանքները տեղադրվում են դարակում, և WCS համակարգը ծանուցվում է առաքման առաջադրանքի ավարտի մասին.
է) Խելացի քառակողմ մաքոքը շարունակում է առաջադրանքի հրահանգներ ստանալ կամ վերադառնում է սպասման տարածք:
2) առաքման եղանակը
ա) Խելացի քառակողմ մաքոքի տեխնիկները նախ միացնում են խելացի քառակողմ մաքոքը և պատրաստում: Խելացի քառակողմ մաքոքը սպասման վիճակում է.
բ) Խելացի քառակողմ մաքոքի ընտրության վայրը հաստատելուց հետո, WCS-ը կպլանավորի վարման երթուղին ըստ խելացի չորսակողմ մաքոքի ներկայիս գտնվելու վայրի և նպատակակետի, այնուհետև անձնակազմը կուղարկի ընտրության առաջադրանքը խելացի չորսին: - ճանապարհային մաքոք WCS-ով;
գ) Խելացի քառակողմ մաքոքը սկսում է ապրանքներ վերցնել՝ համաձայն ստացված առաջադրանքի հրամանի.
դ) Անցման ուղու վրա խելացի քառակողմ մաքոքը շարժվում է տեղաշարժի ռեժիմով իրական հեռավորության վրա: Վարելու ընթացքում այն անընդհատ սկանավորում է այն հետքերը, որոնցով անցնում է մեքենայի մարմնի ստորին հատվածը: Յուրաքանչյուր անցումային դիրք, որը նա անցնում է, դատում և ստուգում է իր անցած հեռավորությունը՝ սկանավորելով հետքերը: Նպատակակետին մոտենալիս այն լավ կարգավորում է կայանման դիրքը կողային լազերային սենսորի միջոցով՝ ճշգրիտ դիրքորոշման վերահսկման և կայանման հասնելու համար.
ե) Ենթաալիքում խելացի քառակողմ մաքոքային մեքենան սկանավորում է խաչմերուկի և կողային տրամաչափման հայելային ռեֆլեկտորը, դատում և չափավորում է վարման հեռավորությունը՝ սկանավորելով այս կետերը և գիտակցում է ենթաալիքում ճշգրիտ դիրքավորման կառավարումը նպատակակետին հասնելու համար: .
Հրապարակման ժամանակը՝ 19-2022թ