


Պահեստավորման և լոգիստիկայի հիմնական օղակներում, ինչպիսիք են խելացի բեռնաթափումը, հավաքումը, տեսակավորումը և այլն, առանձնանում են տուփեր պահող ռոբոտները, որոնք բավարարում են բազմաթիվ կարիքներ: Քանի որ տուփի պահեստավորման ռոբոտը հավաքում և մշակում է բեռնարկղերը, այլ ոչ թե դարակները, դարակների միջև ուղիները կարող են ավելի նեղ լինել, պահեստավորման խտությունը ավելի մեծ է, տարածքը խնայվում է, և այնուհետև պահեստի վարձավճարը խնայվում է. Դրա «կոնտեյներ անձին» հատկանիշը ավելի հարմար է կառուցված պահեստների մեծ մասի համար՝ փոխակերպման ավելի քիչ դժվարությամբ և ավելի լավ ճկունությամբ և համատեղելիությամբ: Տուփի պահեստավորման ռոբոտի շահագործման առարկան միավորի նյութի տուփն է, որն ավելի փոքր է, քան դարակը, ուստի այն ավելի համահունչ է ավելի դիվերսիֆիկացված SKU-ների և ավելի կատարելագործված լոգիստիկ գործառնությունների զարգացման միտումին: Վերջին տարիներին այն կիրառվել է էլեկտրոնային առևտրի լոգիստիկայի և խանութների բաշխման, արտադրության, ամպային պահեստի և շատ այլ սցենարներում: 2020 թվականին տուփեր պահող ռոբոտները դարձել են պահեստային և լոգիստիկ սարքավորումներ արտադրող խոշոր արտադրողների զարգացման թեժ կետ, և նորարարության և իմիտացիայի ջերմային ալիքը մեծանում է:

Հագրիս Կուբո ռոբոտ
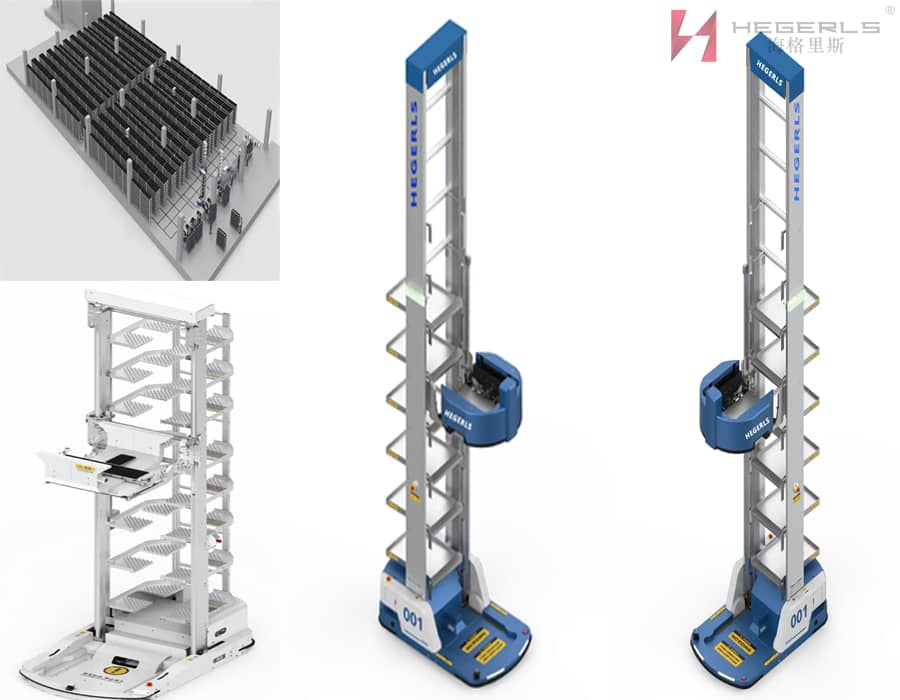
Մշակվել և փորձարկվել է «container to human» ռոբոտը kubao of hegerls: Ռոբոտը կարող է ճշգրիտ գտնել համապատասխան ապրանքները՝ ըստ պատվերի պահանջների։ Միևնույն ժամանակ, շարունակական կրկնությունների և արտադրանքի նորարարությունների միջոցով, մինչ այժմ գործարկվել են մի շարք «kubao» ռոբոտներ՝ բազմաշերտ աղբարկղային ռոբոտ hels A42, կրկնակի խորը աղբարկղ robot helfls a42d, ստվարաթղթե տեսակավորող ռոբոտ hewls a42n, հեռադիտակային ամբարձիչներ heells a42t: և լազերային հարվածի բազմաշերտ աղբարկղային ռոբոտը ունի A42 սլամ, աստիճանաբար ընդգրկելով տուփի պահեստավորման ռոբոտների կիրառման մի շարք սցենարներ: Այս առումով, այսօր մենք կխոսենք դինամիկ լայնությունը կարգավորող տուփի հուլիս a42-fw ռոբոտի մասին:
Hegerls a42-fw-ը՝ տուփի տիպի ռոբոտը՝ դինամիկ լայնության ճշգրտմամբ, ընդունում է դինամիկ լայնության ճշգրտման պատառաքաղի տեխնոլոգիան՝ դինամիկ կերպով հարմարեցնելու պատառաքաղի լայնությունը՝ ըստ տուփի չափի, որպեսզի ապահովի տարբեր չափերի տուփերի հավաքման և մշակման աշխատանքներ: Հզոր AI հաշվողական հզորության վրա հիմնված haiq խելացի կառավարման հարթակով ռոբոտը կարող է ավտոմատ կերպով հատկացնել օպտիմալ պահեստային տարածք՝ ըստ տուփի չափի, ապահովել պահեստային տարածքների միջև նվազագույն տարածությունը և առավելագույնի հասցնել դարակների պահեստի օգտագործումը: Համաձայն այն փաստի, որ hegerls a42-fw-ը կարող է մեծացնել բեռնարկղերի քանակը մոտ 20%-ով` համեմատած ֆիքսված պատառաքաղի ռոբոտի հետ, քանի որ այն օգտագործվել է խոշոր ձեռնարկություններում:

Hearls a42-fw դինամիկ լայնությունը կարգավորող տուփ ռոբոտի բնութագրերը
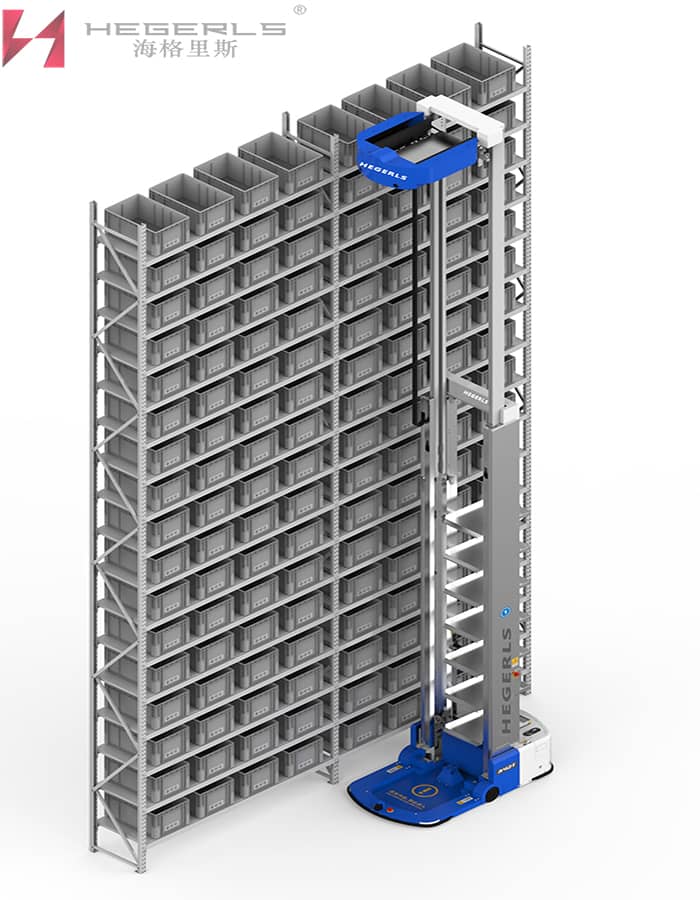
Kubao hegerls a42-fw դինամիկ լայնության ճշգրտման տուփ ռոբոտը ինքնուրույն զարգացնում է դինամիկ լայնության ճշգրտման պատառաքաղի տեխնոլոգիան, դինամիկ կերպով կարգավորում է պատառաքաղի չափը ըստ տուփի չափի և իրականացնում է տարբեր չափերի ստվարաթղթե/աղբարկղերի հավաքումն ու մշակումը: Որպես նոր խելացի լոգիստիկ բեռնաթափման սարքավորում՝ heells a42-fw-ն կարող է իրականացնել խելացի քայլել պահեստային տարածքում առանց որևէ ուղու սարքավորման և ունի ինքնավար նավիգացիայի, ակտիվ խոչընդոտներից խուսափելու և ավտոմատ լիցքավորման գործառույթներ: Համեմատած ավանդական AGV «դարակ առ մարդ» լուծույթի հետ, kubao ռոբոտը հավաքում է հատիկավորությունը ավելի փոքր է: Համակարգի կողմից տրված պատվերի պահանջների համաձայն՝ այն իսկապես իրականացնում է ավանդական «ապրանք փնտրող մարդկանցից» փոխակերպումը արդյունավետ և պարզ «ապրանքներ անձին» խելացի հավաքման ռեժիմի։ Համեմատած սթեյքերի և ավտոմատ եռաչափ պահեստի լուծումների հետ՝ Kubao ռոբոտային համակարգը կարող է իրականացնել արդյունավետ տեղակայում՝ ցածր ընդհանուր տեղակայման արժեքով և ավելի ուժեղ ճկունությամբ. Միևնույն ժամանակ, hegerls a42-fw-ն աջակցում է մի շարք լոգիստիկ սարքավորումների միացմանը, ներառյալ դարակները, փոխակրիչները, մեխանիկական զենքերը, բազմաֆունկցիոնալ աշխատանքային կայանները և այլն: Արտադրանքի ճկուն դիզայնը բերում է ավելի շատ գործառնական տարածք հարմարեցված լուծումների համար, համակողմանիորեն բարելավում է արդյունավետությունը: պահեստավորման գործառնությունների, օպտիմալացնում է պահեստավորման խտությունը և իրականացնում պահեստավորման արդյունաբերության ավտոմատացումն ու խելացի վերափոխումը: Կիրառելի սցենար. այն հարմար է բազմաթիվ չափսերի բեռնարկղերի խառը պահեստավորման սցենարի համար, ինչպիսին է ստվարաթղթե / նյութի տուփի խառը պահեստի կիրառման սցենարը, ինչպիսիք են կոշիկները և հագուստը, էլեկտրոնային առևտուրը և այլն:


Դինամիկ լայնությունը կարգավորող տուփի առավելությունները ունի a42-fw
Դինամիկ լայնացած պատառաքաղ
Hegerls a42-fw, դինամիկ լայնությունը կարգավորող տուփի ռոբոտը, կարող է կարգավորել պատառաքաղները, որպեսզի խելամտորեն հարմարվի բազմաչափ աղբամաններին և ստվարաթղթերին;
Դինամիկ տեղադրություն
Hegerls a42-fw-ը, արկղային ռոբոտը՝ դինամիկ լայնության ճշգրտմամբ, ընդունում է haiq ալգորիթմը՝ պատառաքաղների լայնությունը դինամիկ կերպով կարգավորելու համար, որպեսզի խելացիորեն համապատասխանի պահեստավորման օպտիմալ դիրքը.
Մարմնի լայնությունը 900 մմ
Ա42-fw դինամիկ լայնությունը կարգավորող ռոբոտի ֆյուզելաժի լայնությունը սովորաբար 900 մմ է, իսկ ճանապարհի լայնությունը՝ նեղ մինչև 1000 մմ;
Դարակների շերտերի հեռավորությունը
Դինամիկ լայնությունը կարգավորող տուփի a42-fw ռոբոտի դարակների միջև հեռավորությունը կարող է կրճատվել մինչև առնվազն 250 մմ: Այստեղ հեռավորությունը վերաբերում է նրան, որ երբ կա ծածկագիր, երբ ծածկագիր չկա, այն կարող է կրճատվել մինչև 300 մմ;
Էլեկտրաէներգիայի սպառման սցենար
Hegerls a42-fw-ը՝ տուփի տիպի ռոբոտը՝ դինամիկ լայնության ճշգրտմամբ, սովորաբար ընդունում է 10 վրկ արագ էներգիայի փոխանակման ռեժիմ՝ բավարարելու մեծ և միջին չափի առաջխաղացման հրատապ էներգիայի սպառման սցենարները.
բարձրությունը
Այստեղ վերաբերում է պիկապ բարձրությանը: Ա42-fw դինամիկ լայնությունը կարգավորող ռոբոտի բարձրության նվազագույն միջակայքը 190 մմ է;
3D վիդեո տեխնոլոգիա
Hegerls a42-fw, տուփի տիպի ռոբոտ՝ դինամիկ լայնության կարգավորմամբ, ընդունում է առանց ծածկագրի նույնականացում՝ ապրանքներ վերցնելու և տեղադրելու համար, և ընդունում է առաջադեմ տեսողական ճանաչման 3D տեխնոլոգիա:

Հագերլս - ապագայի մասին
Իրականում, անկախ նրանից, թե արկղերի պահեստավորման ռոբոտների նախագծումից և արտադրությունից ելնելով խոշոր ձեռնարկությունների կողմից, տուփի պահեստավորման ռոբոտների օգտագործումից, տուփի պահեստավորման ռոբոտների տեխնոլոգիան զարգացման անչափելի հեռանկարներ ունի.
Տեսողական արհեստական ինտելեկտի տեխնոլոգիայի օգնությամբ ռոբոտը կարող է ճշգրիտ որոշել թիրախային նյութի տուփի դիրքն ու բարձրությունը և գիտակցել նյութի տուփի ճշգրիտ հավաքումն ու տեղադրումը առանց ծածկագրի: Բացի այդ, այն կարող է նաև ճկուն կերպով միանալ պահեստավորման և լոգիստիկ սարքավորումների, ներառյալ գլանափաթեթի, դարակաշարի, թաքնված AGV-ի, արհեստական աշխատակայանի և այլ գործառնական հարթակների հետ, որոնք ունեն ավելի լայն գործառույթներ. Ճանապարհների նավարկության առումով տուփի պահեստավորման ռոբոտը զարգացել է ավանդական երկչափ կոդային նավիգացիայից մինչև տեսողական սլամ նավիգացիա, այնուհետև լազերային նավարկություն: Տեխնոլոգիան դառնում է ավելի ու ավելի հասուն, որը կարող է արդյունավետորեն ստանալ արտաքին ապրանքներ և շրջակա միջավայրի մասին տեղեկատվություն, ավտոմատ կերպով խուսափել խոչընդոտներից և հարմարվել պահեստի ավելի բարդ և փոփոխական աշխատանքային միջավայրին. Բնօրինակ աղբարկղային ռոբոտն ուներ միայն մեկ աղբամանի դիրք, և հավաքելու արդյունավետությունը ցածր էր: Hegris-ի կողմից մշակված տուփի պահեստավորման ռոբոտից ստեղծվել է մի քանի աղբարկղային բուֆերային դիրքեր ունեցող ռոբոտ, որը կարող է միաժամանակ հավաքել բազմաթիվ թիրախային աղբարկղեր, իրականացնել ավելի բարձր հաճախականության հավաքում և մշակում ավելի քիչ ռոբոտներով և զգալիորեն բարելավել աշխատանքի արդյունավետությունն ու պահեստավորումը: խտությունը։
Հրապարակման ժամանակը՝ հուլիս-04-2022